【Unboxing and review】--- Cheaper lidar robot car--ROSMASTER X1


ROSMASTER X1 is a 4WD drive mobile robot with pendulous suspension chassis based on ROS robot operating system. It supports Jetson NANO/TX2 NX and Raspberry Pi 4B development boards, and is equipped with high-performance hardware configurations such as lidar and depth camera, which can realize robot motion control, remote control communication, mapping building and navigation, following and obstacle avoidance, automatic driving, human body feature recognition and other functions. In addition, the ROSMASTER X1 also supports multiple remote control methods such as APP/handle/computer keyboard. In addition, we have provided 110 teaching videos with Chinese and English subtitles to help users quickly learn about ROS robot operating system and Python programming.
(Max Speed:1.0m/s)
Packing List
Pendulum hanger *1
ROs car expansion board *1
Motor chassis *1
USB HUB expansion board *1
520 gear motor330RPM *4
OLED screen board *1
Frame main control fixing plate *1
LED light bar *1
Anti-collision beam *1
60OOMAH 12.6V power battery and battery charger *1
Pendulum suspension bracket *1
Game handle and handle phone holder *1
Light bar fixed *1
7-inch screen and fixing bracket (optional) *1
Lidar fixing plate *1
Network card antenna (only for Jetson version) *1
Screwdriver *1
RGB cooling HAT(only for Raspberry Pi version) *1
Parts package *4
Several cables
65mm rubber wheel * 4
Data cable *1

There are 3 option for choice
Raspberry Pi version:
Raspberry Pi 4B 4GB board (optional)
64GB TF card (with robot system) *1
Raspberry Pi board accessories package *1
Jetson Nano version:
Jetson Nano 4GB SUB board (optional)
64GB system U disk(with robot system) *1
Jetson Nano accessory package *1
TX2-NX version:
TX2-NX board (optional)
128GB SSD (with robot system) *1
TX2-NX accessories package *1
【Top Hardware Configuration】
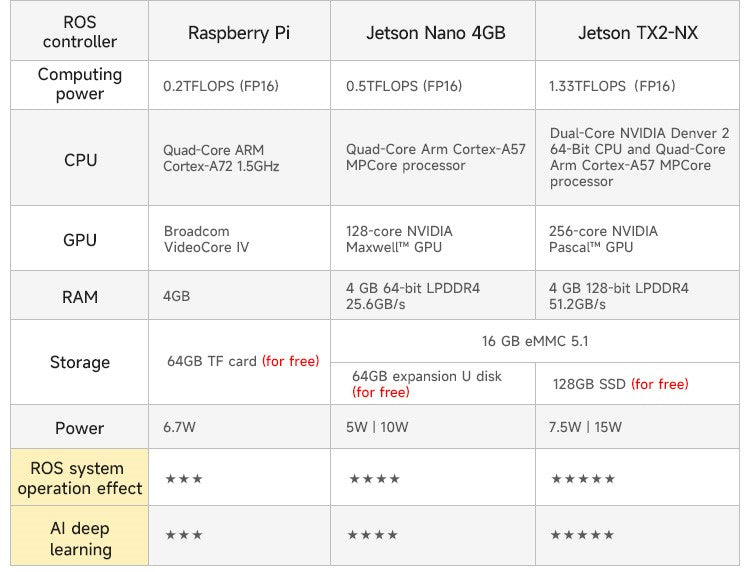
★ Compatible with Raspberry Pi/Jetson NANO 4GB/TX2 NX
The main controller of ROSMASTER X1 adopts Jetson and Raspberry Pi boards, all of which use ubuntu system(Ubuntu 18.04 LTS +ROS Melodic). Different versions have different prices. Users can select the appropriate main control board according to their actual needs.
★ High Cost Performance YDLIDAR X3/SLAM A1 Lidar
Compared with other lidars on the market, these two lidar is cheaper, and its performance is also enough for indoor use in robot cars.
SLAM Lidar Parameter:
Triangular Ranging: 12m; Measure frequency:8000times/s; Scanning frequency:10Hz;

YDLIDAR X3 Parameter:
Triangular Ranging: 8m; Measure frequency:3000times/s; Scanning frequency:5-10Hz;
★ Hot selling depth camera

This depth camera comes with a color camera(RGB), IR camera, infrared projector, and depth processor. With dozens of functions such as face recognition, gesture recognition, human skeleton recognition, 3D measurement, environment perception, 3D mapping navigation, etc., it can be widely used in TV, mobile phone, robot, drone, VR/AR, smart home and other fields.

★ Voice speech recognition module

This voice interaction module adopts CSK4002 chip, comes with voice recognition algorithm and human voice, and can complete voice broadcast after connecting to the speaker. The voice recognition computing power is as high as 128GTOPS, 360° detection of human voice can be achieved within 5 meters. The module supports USB communication and serial communication, and supports Type-C and DuPont line connections. Built-in 85 voice commands commonly used by programming cars, which can be used for most smart car or robotic arm projects.

【Wonderful AI Functions】
★ Lidar obstacle avoidancel tracking: Lidar detects the surrounding environment inreal time and plans apath to avoid obstaclesor follow the nearest 'target of the radar in realtime.

★ lntelligent patrol: Select the route through the mobile APP, andthe car will patrol according to the route.

★ RTAB-Map 3D Visual mapping and navigation: Using the RTAB algorithm to integrate vision and radar, the robot realizes 3D visual mappingand navigation and obstacle avoidance, and supports global relocation and autonomous
positioning.

★ Depth image data l point cloud image: The depth map, color map, and point cloud map of the camera can be obtained through thecorresponding nodes.

★ Autopilot: Supports custom color selection, and the robotcan automatically identify the color area tofollow the line.

★ Al deep learning framework: KNN algorithmprinciple /Tensorflow2.0/Pytorchyolov4-tinylyolov5 and TensorRT acceleration

★ Robot voice interactive control
ROSMASTER R1 is equipped with a high-performance voice interaction module.By issuingvoice commands, it can control the motion status of the car, color tracking, color recognition,Autopilot,robotic arm handlinglsorting and other creative gameplays.

★ Multi-robot navigation
Multiple robots are on the same map to achieve single-point navigation, multi-point navigation,and dynamic obstacle avoidance.

Summary
Compared with all robot cars in Yahboom ROSMASTER series, this X1 car is cheaper and suitable for some college students or beginners with limited funds.
Like the ROSMASTER X3 robot car, this X1 robot car also comes with a suspended chassis, which is suitable for complex terrain, and the maximum speed is 1.0m/s.
The use of cost-effective lidar and depth camera can not only achieve the corresponding functions well, but also save users money.