











Description
Documents
Yahboom Raspberry Pi G1 Tank
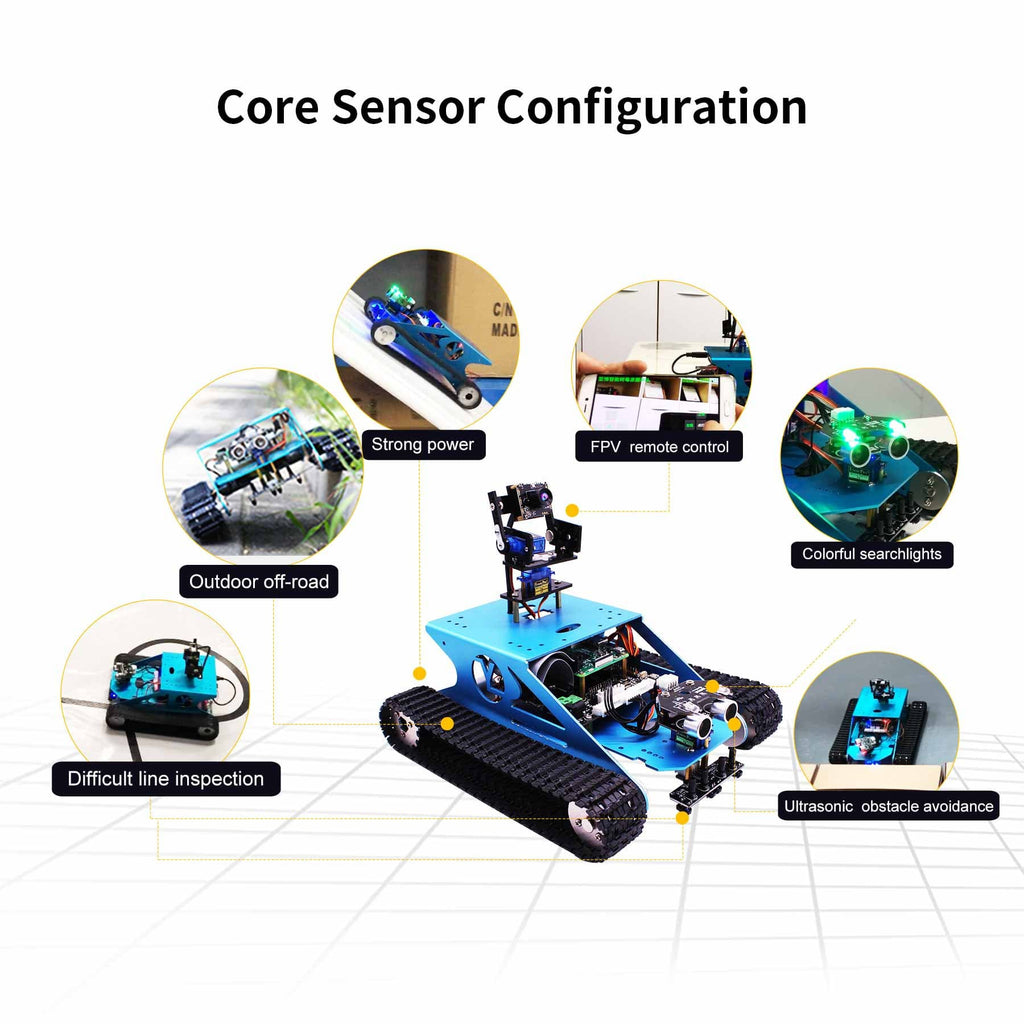
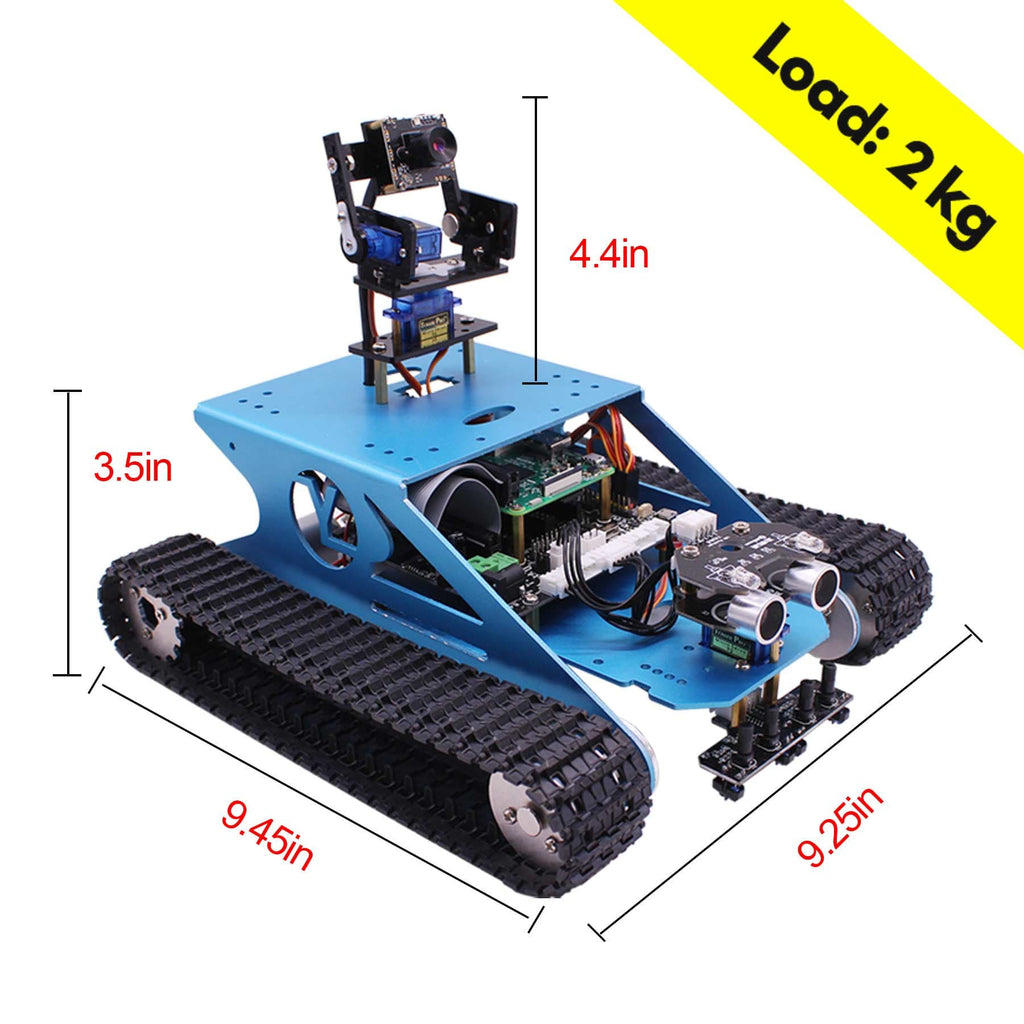
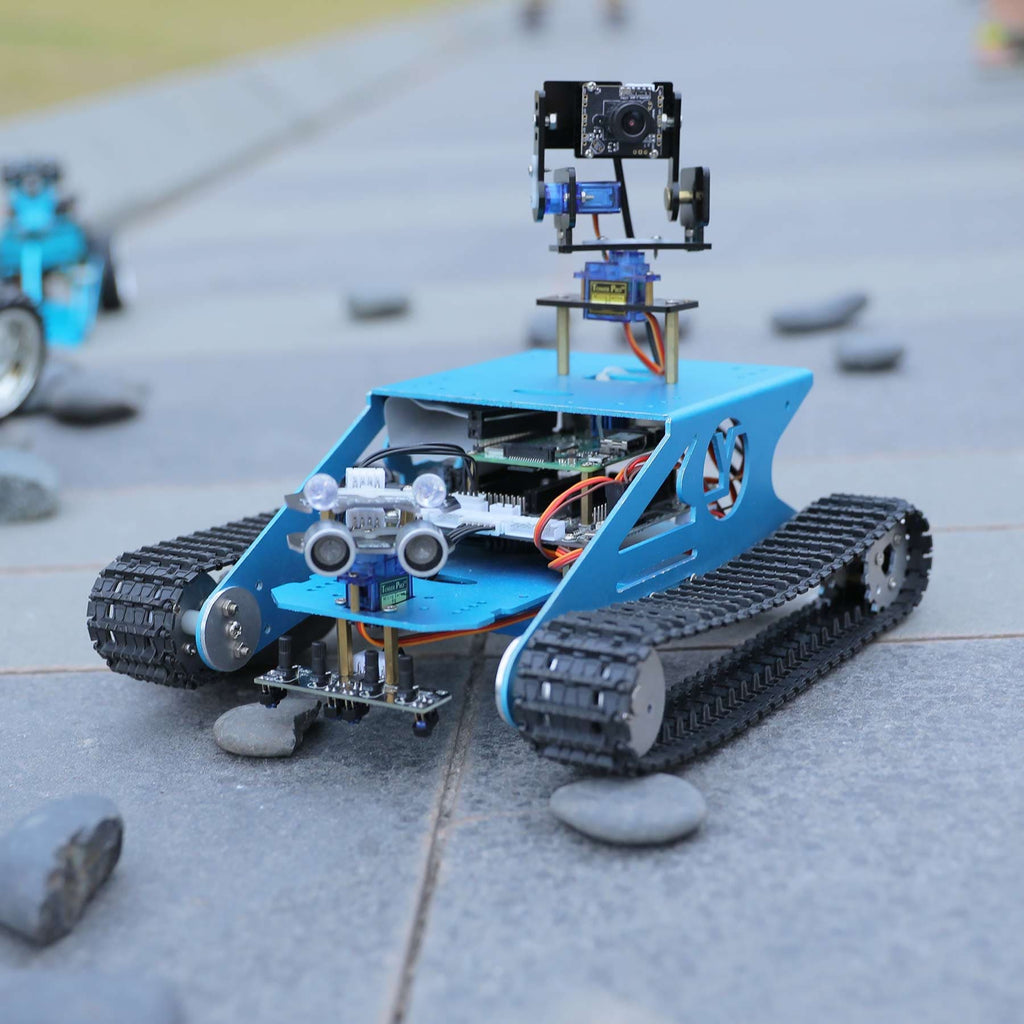
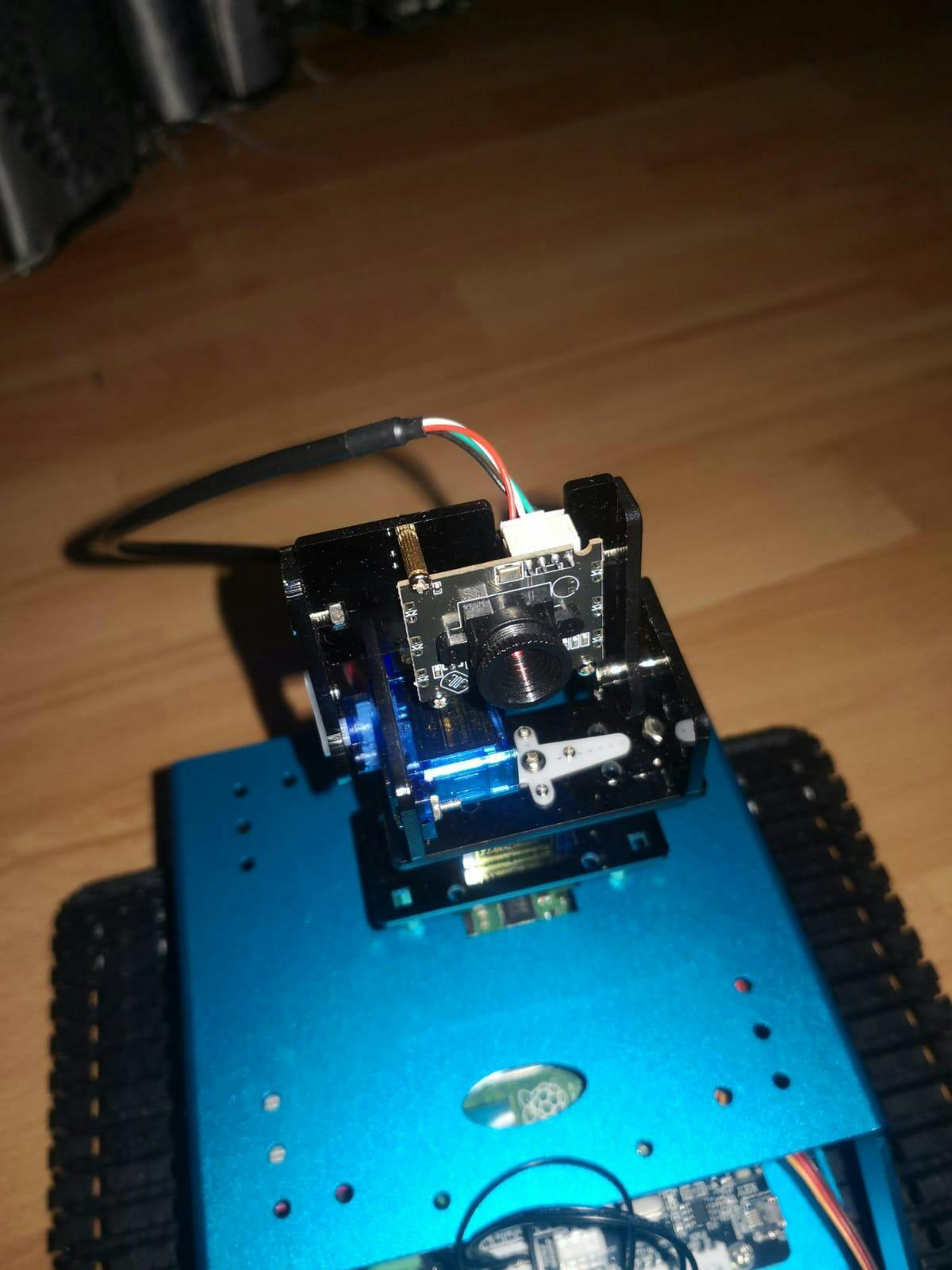
Yahboom Raspberry Pi Tank Robot uses the latest Raspberry Pi 4B development board as the core controller. The vehicle adopts blue aluminum chassis, high-quality track, high-power 370 motor, and metal coupling. When the motor drives the wheel of the car to rotate rapidly, it can achieve the function of climbing up to 60 degrees under the condition of sufficient friction. For this Raspberry Pi tank, real-time video transmission is indispensable. We use a 2DOF camera pan/tilt, a HD USB camera, and the 5G WIFI network that comes with the Raspberry Pi to ensure that high-quality video can be transmitted in real time on mobile APP or PC. It can also complete some AI recognition functions through the camera. Both expansion board and frame we are providing the corresponding extended interface, users can expand and use it according to the information provided by us, so for the tank, educators, learners, and raspberry pi lovers will be the most suitable owners.
Feature
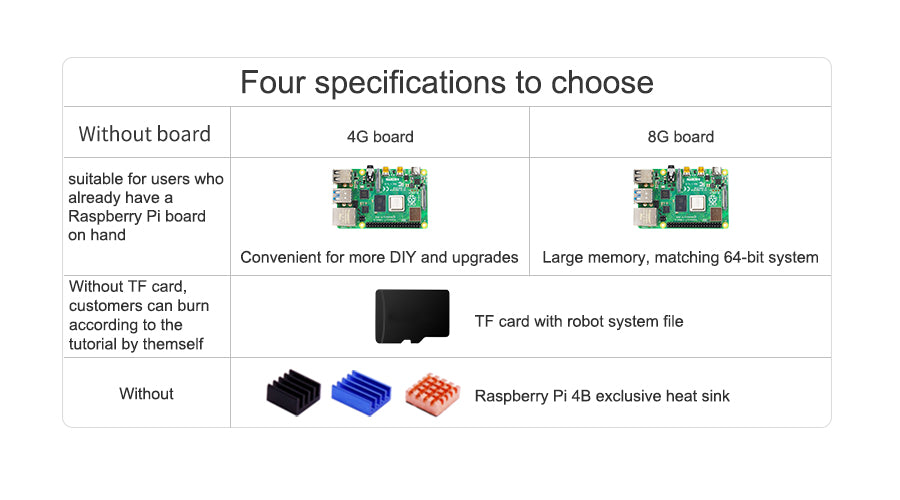
- Compatible with the latest version of Raspberry Pi 4B board.
- The entire vehicle adopts 2mm blue thickened aluminum alloy frame, installation is simple and firm.
- BST-4WD multi-functional expansion board, it is equipped with some interfaces of various sensors and communication modules, and it is compatible with four core controllers: Arduino UNO, 51 microcontroller, STM32, and Raspberry Pi.
- It supports multiple basic functions: high angle climbing, tracking, overing the obstacle, etc.
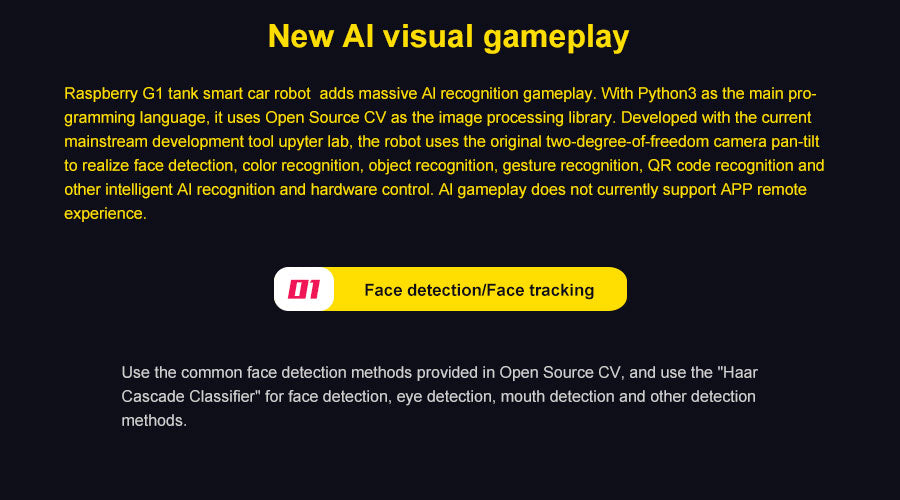
- It supports multiple AI functions: face detection, color tracking, object/QR code recognition etc.
- Users can use C language and Python programming.
- The car and camera platform can be controlled by Bluetooth APP by Android/iOS mobile; HD video real-time transmission can be realized by Raspberry Pi coming with 5G WIFI.
- The vast amount of data and sample program for reference.























Product parameter

Package list

Shipping & Delivery
Payment & Security
Payment

PayPal
The main Payment method is Paypal. If you have paypal, that is great. You can simply place order and check out with few steps. If you don't have Paypal account, you can register it and pay by Credit or Debit Card.
Pay with Paypal
Pay with Credit or Debit Card
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Customer Reviews
The assembly was challenging but it doesn't matter, I have completed it perfectly! WiFi and Bluetooth connection are convenient, and the robot supports C++ and Python, which is very suitable for teaching
I like it. Make my Christmas happy

Assembly is a bit tricky
The logistics were very fast and arrived in just 3 days.
The packaging is very good and there is no damage. The installation manual is very detailed and accompanied by illustrations, but the assembly difficulty is quite high. I repeated it many times before completing the assembly, almost losing patience.
The blue aluminum alloy material looks very high-end.
The seller's service is also great, patiently answering all my questions.
¡Compré esto como regalo de Navidad y a mi hijo le encanta! ! El único inconveniente es que al caminar, las orugas y las piezas metálicas chocan entre sí, haciendo mucho ruido. Incluso si pongo un poco de lubricante en el engranaje de metal, no funciona.
QUESTIONS & ANSWERS
-
1 - can it be upgraded with extra sensors and functions? 2 - does it have a mode to follow person?
Thanks for your question.
1. Yes, you can add extra sensors.
2. Currently we have not developed a function to follow person for this robot car. If you want to follow person, you can check this robot car, link: https://category.yahboom.net/products/jetbot -
Hi, My pi only boots once as soon I have it installed on the tank. What could be the problem for this? After flashing the card it works again (once).
Thanks for your support to Yahboom products.
If you have any problems when using, contact us bu E-mail:suppprt@yahboom.com.
We will provide professional technical support and after-sales service. -
Could it be compatible with Raspberry Pi 2 model B? I’m interested only in line tracking and movement, I may replace the camera with a go pro attached to the arm.
Sorry, we have not tested it on Raspberry Pi 2 at present.
We are developing based on Raspberry Pi 3B/3B+/4B -
Hi! I lost the charger for the batteries what V & A charger should I be looking for? Thank you
The charger parameters used in our car are as follows:
OUTPUT: 8.4V 1A -
HI again! I just want to know how far can it go before losing connection with the phone controller? Thanks!
I am sorry for my misunderstanding.
The APP remote control car is through Bluetooth. The effective transmission distance of Bluetooth is 5m.
The real-time video transmission is through WiFi. Wherever WiFi can cover, it can transmit video in real time. -
Hi! What is the range of this tank?
There is no launch function on our tank. If you need the launch (throwing) function, you can add it by yourself.
-
can they send it to Mexico?
Yes, we can send the package to Mexico.
-
how to replace broken plastic parts
hi,
thanks for your waiting.
please email to support@yahboom.com and the professional support will help you.
have a nice day!
-
where to get additional motor
please email to market@yahbomm.com and we will help you.
-
What is the size of the TF card, if I were to buy it with the tank?
Hello friend,
Our G1 Tank robot use 32G TF card.
If you want to buy that. Check this link: https://category.yahboom.net/products/16g-tf-card
-
Is it possible to purchase a backup battery pack separately?
Due to the fact that batteries are classified as flammable and explosive dangerous goods, the courier company does not support transporting batteries separately, so we are unable to sell batteries separately. We apologize for any inconvenience caused.
The following are the parameters of the batteries used in Tank cars, which you can try to purchase locally.
Battery pack model: 18650-3S
Material shell: PVC
Rated voltage: 11.1V
Rated capacity: 2000mAh
Discharge cut-off voltage: 9.0V ± 0.05V
Discharge current: 1.5C
External dimensions: 55 * 18 * 67mm
Maximum charging voltage: 12.6V -
What is the purpose of the Raspberry pi 4? And do you really need it
Raspberry Pi is like the brain of a tank car. Without Raspberry Pi, the tank car will not work properly