



































JetCobot est un bras robotique collaboratif visuel à 7 axes. Il utilise la carte de développement de la série NVIDIA comme carte de commande principale. Il adopte une configuration similaire au robot UR, un mouvement flexible et une portée de bras effective maximale de 270 mm. Grâce au système d'exploitation du robot ROS et à l'algorithme de cinématique inverse, les fonctions de contrôle des coordonnées du bras robotique, de planification des mouvements, de préhension et de tri sont réalisées. Il est équipé d'une caméra USB de 0,3 MP, combinée à des images OpenCV, à la vision artificielle, à l'apprentissage en profondeur et à d'autres algorithmes, peut compléter l'interaction des couleurs, le suivi du visage, la reconnaissance des étiquettes, la formation des modèles, l'interaction gestuelle et d'autres fonctions. En plus de prendre en charge le contrôle de simulation MoveIt, JetCobot prend également en charge l'application, la poignée, le contrôle Web sur PC.
Contrôle de haute précision et mouvement flexible
JetCobot adopte une conception à 7 axes, a une configuration similaire au robot UR et, avec l'algorithme de cinématique inverse, il assure un contrôle de mouvement flexible et précis. L'envergure maximale effective du bras est de 270 mm, la plage de rotation de l'articulation est de -153 ° ~ 153 ° et il peut gérer une variété de tâches d'opération complexes.
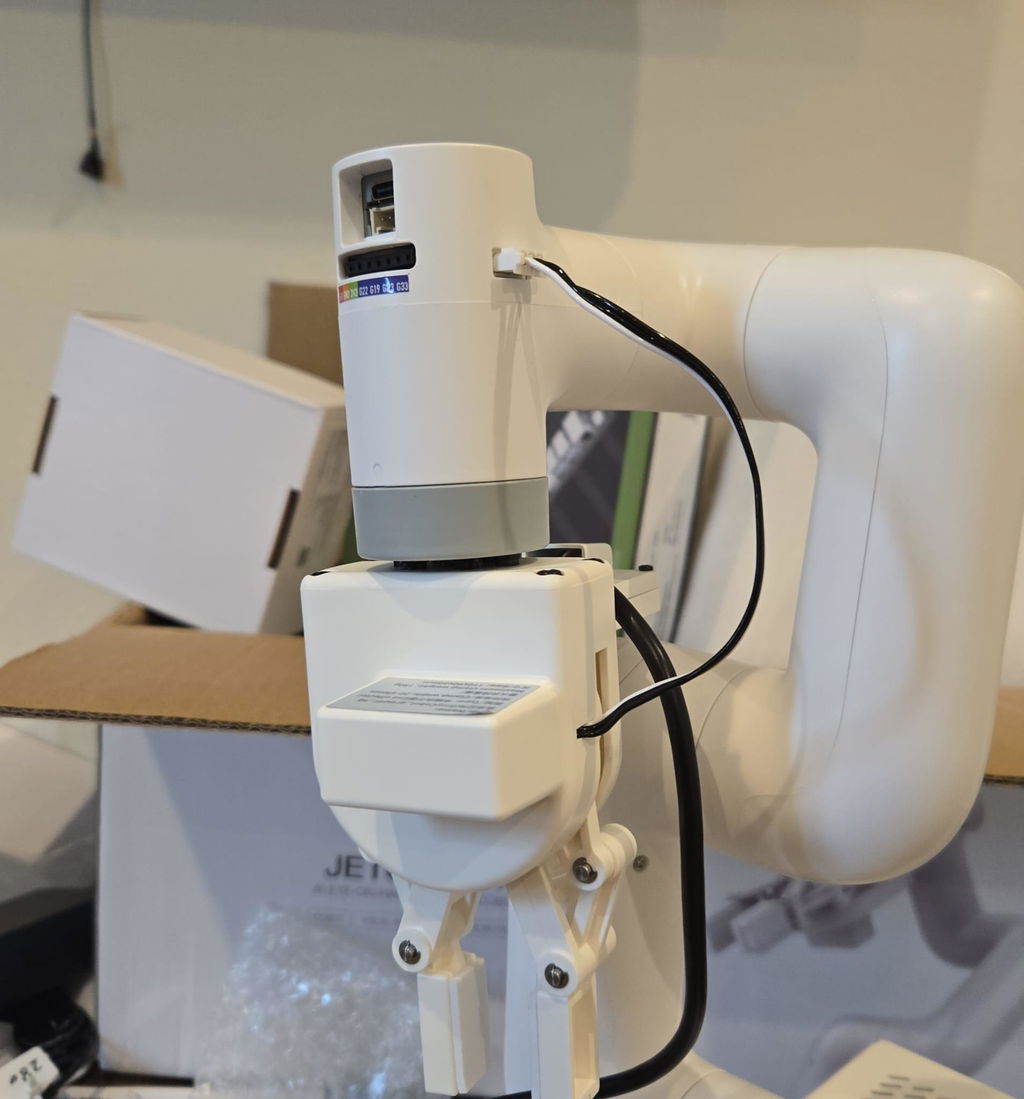
Caméra et bras robotisé 2 en 1
Equipé d'une caméra USB de 0,3 MP avec un champ de vision de 110 ° . Combinant le traitement d'image OpenCV, la vision artificielle et les algorithmes d'apprentissage en profondeur, JetCobot peut réaliser des fonctions telles que l'interaction des couleurs, le suivi du visage, la reconnaissance des balises, la formation des modèles et l'interaction gestuelle.
Basé sur les cartes de développement de la série NVIDIA
Avec les cartes de développement de la série NVIDIA comme contrôle principal, JetCobot dispose d'une puissance de calcul puissante et de capacités de traitement de l'IA, qui peuvent traiter efficacement des algorithmes de vision et de contrôle complexes pour garantir une réponse en temps réel et une exécution efficace.
Prend en charge plusieurs méthodes de contrôle
Basé sur le système d'exploitation du robot ROS, JetCobot peut réaliser le contrôle de simulation MoveIt et prend également en charge le contrôle APP (uniquement pour Android), le contrôle de la poignée et le contrôle Web PC pour répondre aux besoins de différents utilisateurs.


































Lien vers les tutoriels
Bras robotique collaboratif visuel à 7 axes JetCobot pour Jetson NANO 4GB/Orin NANO/Orin NX
Vendeur : Yahboom
SKU : 3000200636
Need help with choosing the right product?
Click here to reach out to one of our experts.
JetCobot est un bras robotique collaboratif visuel à 7 axes. Il utilise la carte de développement de la série NVIDIA comme carte de commande principale. Il adopte une configuration similaire au robot UR, un mouvement flexible et une portée de bras effective maximale de 270 mm. Grâce au système d'exploitation du robot ROS et à l'algorithme de cinématique inverse, les fonctions de contrôle des coordonnées du bras robotique, de planification des mouvements, de préhension et de tri sont réalisées. Il est équipé d'une caméra USB de 0,3 MP, combinée à des images OpenCV, à la vision artificielle, à l'apprentissage en profondeur et à d'autres algorithmes, peut compléter l'interaction des couleurs, le suivi du visage, la reconnaissance des étiquettes, la formation des modèles, l'interaction gestuelle et d'autres fonctions. En plus de prendre en charge le contrôle de simulation MoveIt, JetCobot prend également en charge l'application, la poignée, le contrôle Web sur PC.
Contrôle de haute précision et mouvement flexible
JetCobot adopte une conception à 7 axes, a une configuration similaire au robot UR et, avec l'algorithme de cinématique inverse, il assure un contrôle de mouvement flexible et précis. L'envergure maximale effective du bras est de 270 mm, la plage de rotation de l'articulation est de -153 ° ~ 153 ° et il peut gérer une variété de tâches d'opération complexes.
Caméra et bras robotisé 2 en 1
Equipé d'une caméra USB de 0,3 MP avec un champ de vision de 110 ° . Combinant le traitement d'image OpenCV, la vision artificielle et les algorithmes d'apprentissage en profondeur, JetCobot peut réaliser des fonctions telles que l'interaction des couleurs, le suivi du visage, la reconnaissance des balises, la formation des modèles et l'interaction gestuelle.
Basé sur les cartes de développement de la série NVIDIA
Avec les cartes de développement de la série NVIDIA comme contrôle principal, JetCobot dispose d'une puissance de calcul puissante et de capacités de traitement de l'IA, qui peuvent traiter efficacement des algorithmes de vision et de contrôle complexes pour garantir une réponse en temps réel et une exécution efficace.
Prend en charge plusieurs méthodes de contrôle
Basé sur le système d'exploitation du robot ROS, JetCobot peut réaliser le contrôle de simulation MoveIt et prend également en charge le contrôle APP (uniquement pour Android), le contrôle de la poignée et le contrôle Web PC pour répondre aux besoins de différents utilisateurs.
Lien vers les tutoriels

Questions & Answers
Have a Question?
-
how to start my robot
hi,please email to support@yahboom.com and our support will help you with the tutorials.
-
Estoy interesado en adquirir el brazo robotico con Jetson NANO 4GB quiero saber cuanto saldria el costo de envio a mi Pais Ecuador lo hace directo ? me ayuda con esa informacion por favor.
Hola,
Gracias por su consulta.
Ofrecemos envío gratuito del brazo robótico Jetcobot a Ecuador (excepto zonas remotas), con un tiempo de tránsito estimado de 7 a 9 días laborables a través de DHL.
Su paquete se enviará en un plazo de 1 a 2 días laborables desde la realización del pedido.
Si le resulta conveniente, responda a market@yahboom.com indicando su código postal y ciudad para que podamos verificar si su dirección está clasificada como remota.
Esperamos tener noticias suyas.
Atentamente,
Yahboom Team
-
I am a Deputy Technical Manager at the University of West of England Bristol Robotics Lab and we are preparing to purchase 10+ YahBoom Robot Arms. There are no width dimensions for the Robotic Arm Bottom Plate or the views in your dimension drawings. I am looking at how they will be setup in one of our teaching labs using ROS2. Please can you provide me access to the 3D file so that I can plan mounting and positions. Many Thanks
Hello, the images show the corresponding parameters for the robotic arm and baseplate, which can help you plan your lab. The 3D model can be found at this link:
https://drive.google.com/drive/folders/1DPJp4ByiZvGxHmBm3SymkyipQxkkt7h3?usp=drive_link

-
What is the payload?
Max Payload: 150g