【Déballage et avis】--- Voiture robot à conduite automatique ROSMASTER R2L


ROSMASTER R2L est un robot avec structure de direction Ackerman, conçu pour la conduite automatique. Il prend en charge la carte Jetson NANO/Xavier NX/TX2 NX et est développé sur la base des systèmes d'exploitation ROS et Ubuntu. Nous utilisons une caméra haute définition de 2 MP et combinons certains algorithmes de reconnaissance pour réaliser la formation du modèle, le pilotage automatique, la reconnaissance d'objets, le suivi des balises et d'autres fonctions. Comme d'autres voitures robotisées Yahboom, R2L prend en charge le contrôle par APP/émoticône. Nous avons fourni 80 cours avec des sous-titres en chinois et en anglais, qui peuvent aider les utilisateurs à démarrer avec la formation du modèle de conduite automatique et le système d'exploitation ROS.
(Vitesse maximale : 1,8 m/s)
Liste de colisage
Châssis directeur Ackerman*1
Moteur à engrenages 520 550 tr/min *2
Plaque de fixation de barre lumineuse *1
Plaque de fixation de caméra *1
Caméra HD *1
Roues en caoutchouc de course *4
Guide lumineux à colle blanche *1
Tournevis *1
Paquet de pièces *3
Carte d'extension ROScar*1
Batterie d'alimentation 6000MAH 12,6V et chargeur de batterie *1
Poignée de jeu et support de téléphone portable *1
Antenne de la carte réseau)
Plusieurs câbles
Câble de données*1
Plusieurs lignes de connexion *N
Piste de pilote automatique (3,2 m x 2,8 m) * 1 (uniquement pour le kit avancé)
Modèle de feu de circulation *1 (uniquement pour le kit avancé)
Panneau en fer * 5 (uniquement pour le kit avancé)
Autocollant de panneau de signalisation *10 (uniquement pour le kit avancé)
Boîte en aluminium aéronautique de haute qualité * 1 (uniquement pour le kit avancé)

Il y a 3 options au choix
Version Jetson Nano :
Carte SUB Jetson Nano 4 Go (en option)
Disque U système 64 Go (avec système robot) *1
Pack d'accessoires Jetson Nano *1
Version TX2-NX :
Carte TX2-NX (en option)
SSD 128 Go (avec système robotisé) *1
Pack d'accessoires TX2-NX *1
Version Xavier NX :
Carte SUB Xavier NX 8 Go (en option)
SSD 128 Go (avec système robotisé) *1
Pack d'accessoires Xavier NX *1
【Configuration matérielle supérieure】
★ Compatible avec Jetson NANO 4 Go/Xavier NX/TX2 NX
Le contrôleur principal du ROSMASTER R2L adopte des cartes de la série Nvidia Jetson, qui utilisent toutes le système Ubuntu. Les utilisateurs peuvent sélectionner la carte de contrôle principale appropriée en fonction de leurs besoins réels.
★Châssis Ackerman
La direction Ackerman est un mode de direction de véhicule moderne. ROSMASTER R2L utilise une structure de châssis Ackerman en alliage d'aluminium. Lorsque le chariot R2L tourne, les roues intérieures et extérieures peuvent tourner à des angles différents. Le rayon de braquage du pneu intérieur est plus petit que celui du pneu extérieur.
★Carte de suivi de conduite automatique 8 m x 3,2 m
Le ROSMASTER R2L est doté d'une structure de direction Ackerman, ce qui le rend particulièrement adapté aux scénarios de conduite automatique. Nous avons conçu une carte de patrouille de ligne pour le R2L et inclus certains accessoires tels que des panneaux de signalisation et des panneaux de guidage.
Les utilisateurs peuvent réaliser la reconnaissance et la détection des panneaux de signalisation en définissant des scénarios de conduite automatique, en formant des modèles et en déployant Darknet YOLO.
Cette carte est faite de toile imprimée UV de haute qualité, avec des couleurs vives, une résistance à la corrosion, à la moisissure, aux taches et une récupération des plis.
★ Caméra HD
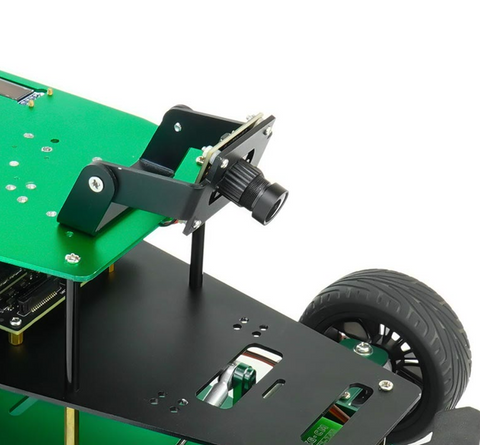
Nous avons remplacé la caméra de profondeur par une petite caméra haute définition avec un rapport qualité-prix élevé, qui peut non seulement réaliser des fonctions de conduite automatique et de reconnaissance visuelle de l'IA, mais également réduire le coût afin que davantage d'utilisateurs puissent se le permettre.
!!! Remarque : prend en charge la sélection de couleurs définie par l'utilisateur et le robot peut identifier automatiquement la zone de couleur pour la patrouille de ligne.
【Méthode de contrôle à distance inspirante】
Il prend non seulement en charge le contrôle APP du double système iOS/Android, mais fournit également une application de navigation de création de cartes pour répondre aux exigences du contrôle APP multi-scènes.
Le kit robot comprend un contrôleur de jeu, qui permet de découvrir la sensation du FPV en combinaison avec l'application pour téléphone portable.


◆◆◆Processus de fonctionnement de conduite automatique
Étape 1 : Modèle de formation
Utilisez yolov5 pour entraîner le modèle et identifier le modèle : R2L a installé l'environnement yolov5, qui peut entraîner et identifier le modèle. Il vous suffit d'importer des images d'entraînement, puis de charger le modèle pour l'identifier après l'entraînement.
R2L a également construit le framework Jetracer. Grâce à la formation d'images de route, à l'exportation de modèles et à d'autres étapes, la conduite automatique peut également être réalisée sur la table de sable.
Étape 2 : Conduite entièrement automatique
- Allez tout droit

- Tournant

- Identification des feux de circulation

- Parking

Résumé
Par rapport à la voiture R2 existante, la R2L est équivalente à sa version simplifiée. Elle ne contient qu'une petite caméra haute définition, à l'exclusion du radar, de la caméra de profondeur et de l'écran de 7 pouces. Elle est principalement applicable aux scènes de conduite automatique, plutôt qu'à la vision IA ou à la navigation par cartographie radar, à la simulation de bras robotisé et à d'autres scènes.