【Unboxing y revisión】--- Automóvil robot Transbot SE AI Vision


TRANSBOT-SE es un automóvil robot con orugas desarrollado con base en el sistema operativo del robot. Todo el cuerpo está hecho de aleación de aluminio. Equipado con un brazo robótico de 3 grados de libertad y una cámara PTZ de 2 grados de libertad, 520 motores de codificador y una batería de gran capacidad. Es compatible con Jetson Nano B01 y Raspberry Pi 4B. Con algoritmo de procesamiento de imágenes OpenCV integrado, aprendizaje automático MediaPipe, marco de aprendizaje profundo de IA y plataforma de simulación movelt, Transbot SE puede realizar funciones como control de movimiento de robot, reconocimiento de gestos, reconocimiento de objetos, seguimiento, conducción automática y control de simulación de brazo robótico.
Lista de embalaje
Marco Transbot SE *1
Placa superior Transbot SE *1
Rueda motriz *4 + rueda de apoyo *16
Eje de transmisión *2 + columna de carga *8
Rueda motriz *2
Pista Transbot SE *2
Brazo robótico 3DOF *1
Cámara PTZ de 2 grados de libertad *1
Placa de expansión *1
Motor 520 con codificador *2
Brida para cables *1
Varios cables
Placa acrílica con paquete de batería *1
Destornillador *1
Paquete de batería *1
Cargador de batería *1
Paquete de piezas *1
Mango + pila AAA *1
Manual de instrucciones *1
Acoplamiento Transbot SE *2
Pantalla OLED + placa protectora acrílica + cable
Cable de cámara tipo L *1
Velcro*1

Hay dos versiones para elegir.
Versión JETSON NANO
Jetson NANO 4GB B01 (opcional) *1
Disco U *1
Tarjetas de red inalámbrica M.2 + antenas *1
Ventilador de enfriamiento *1
Paquete de piezas (NANO) *1
Versión Raspberry Pi
Raspberry Pi 4B (opcional) *1
Gorro de refrigeración RGB *1
Lector de tarjetas *1
Tarjeta TF *1
Paquete de piezas (PI) *1
Instalar coche robot
El automóvil no fue ensamblado antes del envío, por lo que debemos completar la instalación de acuerdo con las instrucciones o el video de ensamblaje.
Enlace del tutorial de Transbot SE: http://www.yahboom.net/study/Transbot-SE
Consulte el vídeo de instalación en nuestro sitio web, como se muestra a continuación.



Apariencia
1. Este pequeño automóvil adopta una estructura de aleación de aluminio blanco en su totalidad, con un brazo robótico de tres grados de libertad.
2. El motor 520 está emparejado con dos pistas negras.

Tras las pruebas, el coche puede circular por diferentes superficies y poseer ciertas capacidades todoterreno.

Descripción general del hardware
1. Transbot SE adopta un motor de alta potencia 1:56 205 ± 10 rpm 520 ; paquete de batería de 12,6 V 4400 mAH con mayor duración de batería, suficiente para que los usuarios la utilicen; y la placa de expansión multifuncional conecta todas las partes del automóvil, ayudando al automóvil a completar una serie de funciones.
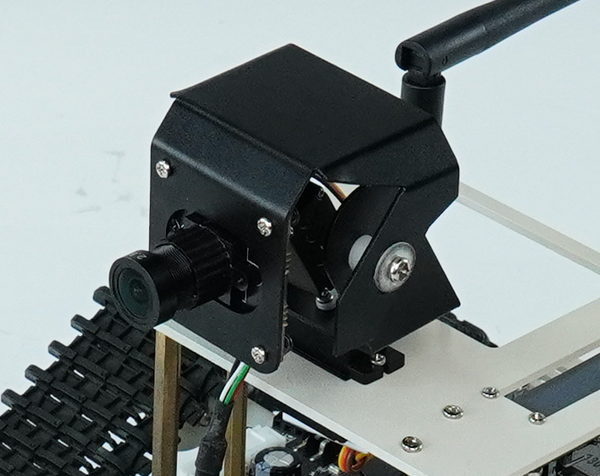
2. La cámara PTZ Transbot SE 2DOF consta de dos servos y un módulo de cámara de 2 MP , que admite la transmisión en tiempo real de imágenes de video panorámicas.

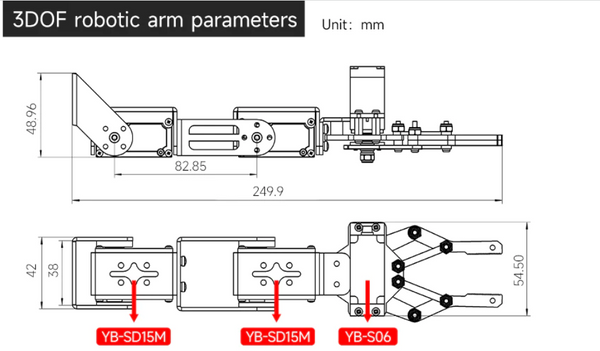
3. El brazo robótico de tres grados de libertad consta de un servo de bus de 6 kg y dos servo de bus de 15 kg, que pueden agarrar y transportar objetos.

Funciones inteligentes
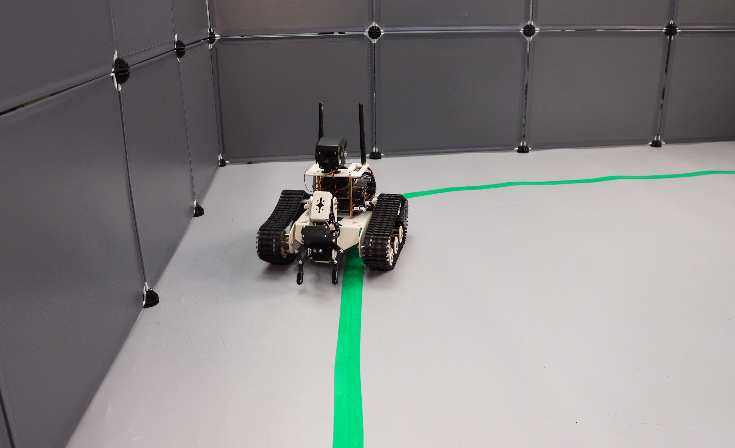
Conducción autónoma
Utilice el módulo de cámara para obtener imágenes en tiempo real, y analice la escena mediante procesamiento de imágenes y visión artificial. Análisis de algoritmos para identificar elementos clave como carreteras, obstáculos, señales de tráfico, etc.
Manejo de objetos
El brazo robótico de tres grados de libertad puede agarrar libremente cualquier objeto, y la configuración de tipo oruga del automóvil le permite lograr la función de escalada.


Reconocimiento y seguimiento de colores
Adquirir imagen : utilice el módulo de cámara para obtener datos de imágenes en tiempo real.
Preprocesamiento de imágenes : preprocesar las imágenes obtenidas, incluido el ajuste del brillo, el contraste, la reducción de ruido y otras operaciones para mejorar la precisión del reconocimiento del color.
Convertir espacio de color : convierte una imagen del espacio de color RGB al espacio de color HSV. Hace que el reconocimiento de color sea más cómodo y preciso.
Establecer rango de colores : establezca el rango de colores HSV correspondiente según el color que desee reconocer. Determine el rango de colores de interés ajustando los límites superior e inferior de tono, saturación y brillo.
Segmentación de color : compare cada píxel de la imagen con el rango de color establecido, marque los píxeles elegibles como color de destino y marque los demás píxeles como fondo.
Detección de objetivos : procesa el área de color marcada mediante operaciones morfológicas como corrosión y dilatación para eliminar el ruido y conectar el área del objetivo. Esto permite obtener la posición y la forma del objetivo identificado.

Control de programación
El vehículo de orugas admite varios lenguajes de programación, incluidos Python y C++. Al escribir código, podemos lograr un control preciso, como avanzar, retroceder, girar y varias acciones personalizadas. Esto proporciona a los usuarios un amplio espacio creativo para personalizar el comportamiento del vehículo según sus propias necesidades. 
Yahboom ofrece muchos cursos de código abierto para que los usuarios puedan consultarlos.
Enlace de tutoriales: http://www.yahboom.net/study/Transbot-SE
Punto de vista
Transbot SE es una herramienta educativa ideal que puede estimular el interés de los estudiantes por la ciencia y la tecnología. A través de la programación y la práctica, los estudiantes pueden comprender los principios de funcionamiento y los métodos de control de los robots, cultivar las habilidades de resolución de problemas y el pensamiento innovador. Al mismo tiempo, las funciones enriquecidas también proporcionan a los profesores abundantes recursos y casos didácticos.
Además, también es una plataforma experimental ideal para que los desarrolladores profesionales realicen investigaciones e innovaciones en materia de robots. Además, también se puede utilizar en escenarios prácticos como el control de hogares inteligentes, el monitoreo de patrullas y el monitoreo ambiental.