









































Cette voiture MicroROS-Pi5 ROS2 est développée sur la base de Raspberry Pi 5. Elle se compose d'une carte d'extension de robot Micro ROS avec coprocesseur ESP32, d'un moteur d'encodeur 4PCS 310, de pneus de haute qualité, d'une batterie rechargeable 7,4 V 2000 mAh, d'un lidar MS200, d'une caméra 2 MP, d'un cardan 2DOF et d'un cadre en alliage d'aluminium. Il adopte l'environnement de développement ROS2-HUMBLE et la programmation Python3, et utilise le traitement d'image OpenCV et les algorithmes d'apprentissage automatique MediaPipe pour réaliser de multiples fonctions telles que le contrôle du mouvement du robot, l'interaction visuelle de l'IA, la navigation par cartographie SLAM, la simulation RViz et le contrôle de synchronisation multi-machines. Les utilisateurs peuvent le contrôler via une application mobile, un contrôleur sans fil, un contrôle par clavier d'ordinateur. Yahboom fournira à chaque client des supports de didacticiel détaillés, des vidéos d'installation et un support technique professionnel.
Caractéristiques
- Convient à la carte Raspberry Pi 5. La dernière solution d'alimentation peut fournir une alimentation 5,1 V/5 A pour le RPi 5, garantissant que l'interface USB fournit suffisamment de courant pour libérer toutes les performances du RPi 5.
- Utilisation de Raspberry Pi OS + ROS2-HUMBLE, Python3 comme langage de programmation.
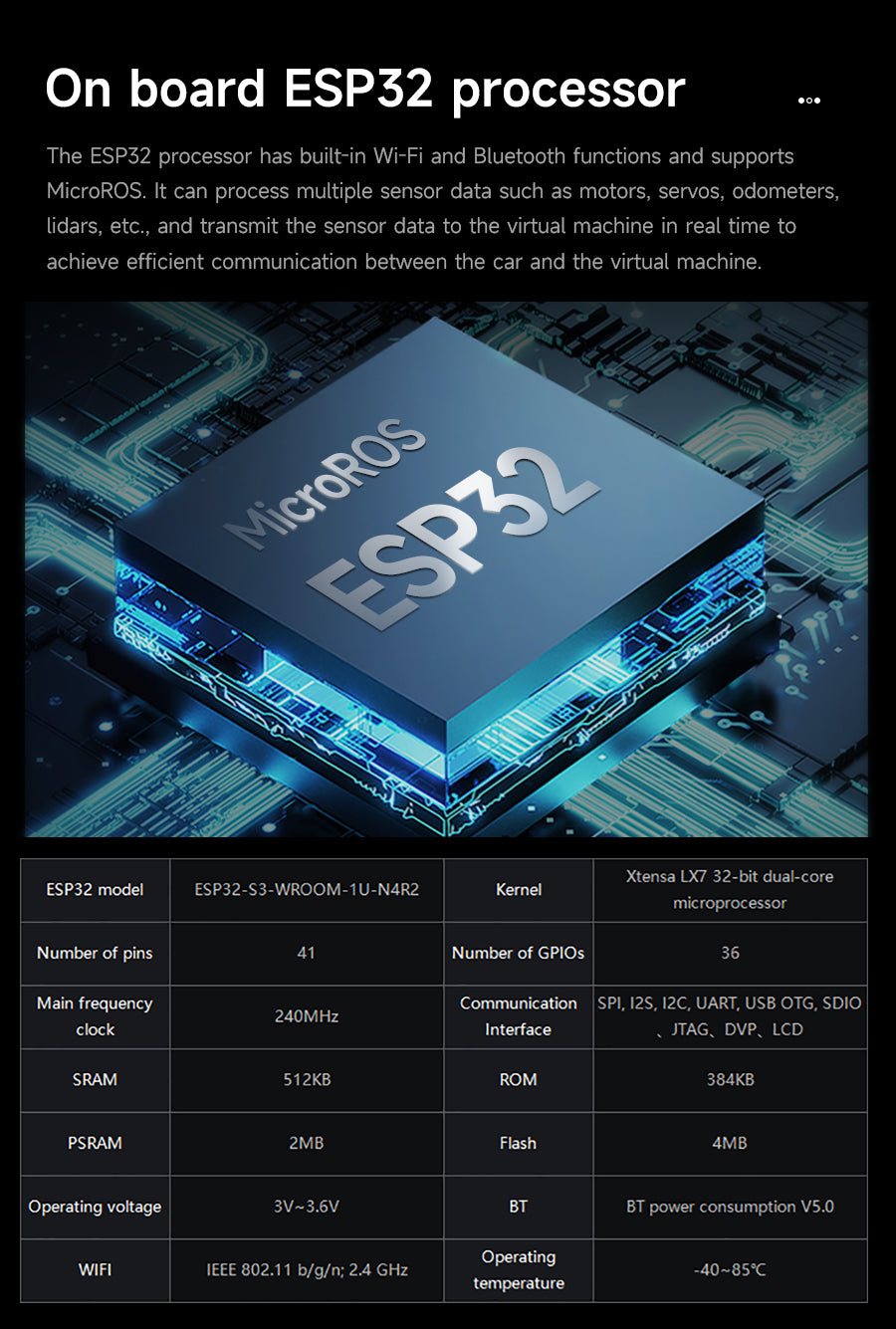
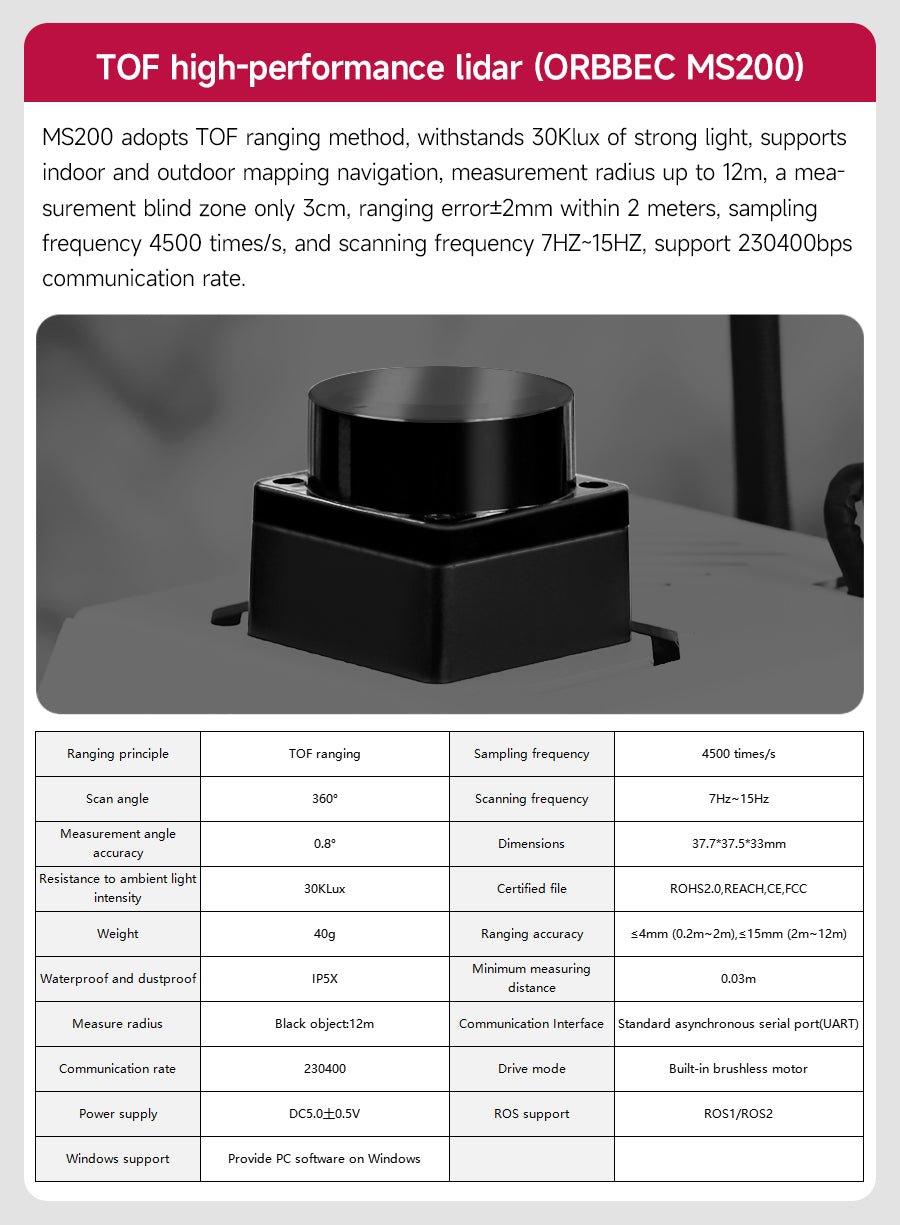
- Équipé d'une carte d'extension de robot ESP32-Micro ROS, d'un moteur d'encodeur 310, d'un lidar MS200, d'une caméra PTZ 2DOF, d'un refroidisseur Cool Pi 50 et d'autres périphériques matériels.
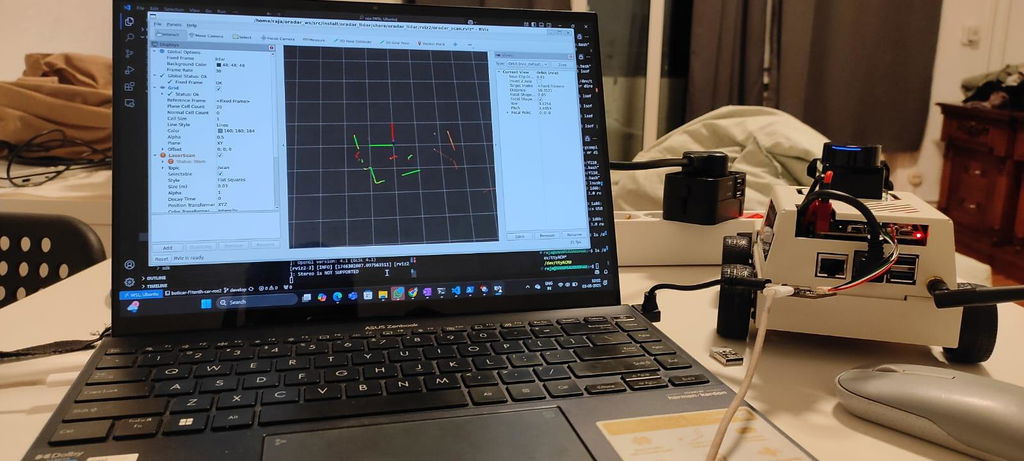
- La reconnaissance des gestes, le suivi des couleurs, la détection d'attitude MediaPipe, la navigation par cartographie lidar, la planification de chemin, le suivi et l'évitement des obstacles peuvent être facilement réalisés.
- La carrosserie de la voiture est en alliage d'aluminium anodisé, combiné à une conception structurelle unique, belle et durable.






















Détails

Liste d'expédition

Lien vers le tutoriel
http://www.yahboom.net/study/MicroROS-Pi5
Voiture robotisée MicroROS-Pi5 ROS2 pour Raspberry Pi 5 (ROS2-HUMBLE + Python3)
Vendeur : Yahboom
SKU : 6000200579
Need help with choosing the right product?
Click here to reach out to one of our experts.
Cette voiture MicroROS-Pi5 ROS2 est développée sur la base de Raspberry Pi 5. Elle se compose d'une carte d'extension de robot Micro ROS avec coprocesseur ESP32, d'un moteur d'encodeur 4PCS 310, de pneus de haute qualité, d'une batterie rechargeable 7,4 V 2000 mAh, d'un lidar MS200, d'une caméra 2 MP, d'un cardan 2DOF et d'un cadre en alliage d'aluminium. Il adopte l'environnement de développement ROS2-HUMBLE et la programmation Python3, et utilise le traitement d'image OpenCV et les algorithmes d'apprentissage automatique MediaPipe pour réaliser de multiples fonctions telles que le contrôle du mouvement du robot, l'interaction visuelle de l'IA, la navigation par cartographie SLAM, la simulation RViz et le contrôle de synchronisation multi-machines. Les utilisateurs peuvent le contrôler via une application mobile, un contrôleur sans fil, un contrôle par clavier d'ordinateur. Yahboom fournira à chaque client des supports de didacticiel détaillés, des vidéos d'installation et un support technique professionnel.
Caractéristiques
- Convient à la carte Raspberry Pi 5. La dernière solution d'alimentation peut fournir une alimentation 5,1 V/5 A pour le RPi 5, garantissant que l'interface USB fournit suffisamment de courant pour libérer toutes les performances du RPi 5.
- Utilisation de Raspberry Pi OS + ROS2-HUMBLE, Python3 comme langage de programmation.
- Équipé d'une carte d'extension de robot ESP32-Micro ROS, d'un moteur d'encodeur 310, d'un lidar MS200, d'une caméra PTZ 2DOF, d'un refroidisseur Cool Pi 50 et d'autres périphériques matériels.
- La reconnaissance des gestes, le suivi des couleurs, la détection d'attitude MediaPipe, la navigation par cartographie lidar, la planification de chemin, le suivi et l'évitement des obstacles peuvent être facilement réalisés.
- La carrosserie de la voiture est en alliage d'aluminium anodisé, combiné à une conception structurelle unique, belle et durable.
Détails
Liste d'expédition
Lien vers le tutoriel
http://www.yahboom.net/study/MicroROS-Pi5

Questions & Answers
Have a Question?
-
Is there no further update available for version yahboomtechnology/ros-humble:4.1.2? I used a devcontainer to edit the source code in PyCharm, but it cannot recognize /usr/bin/python3. How can I make it recognize it? Is there a GitHub repository where I can get the source code and Dockerfile for yahboomtechnology/ros-humble:4.1.2 image?
hi,
plz email to: support@yahboom.com
and we will reply you asap!
-
Can it be used with Pi4B?
Hello friend,
It didn't support Raspberry Pi 4B. Just support Raspberry Pi 5.
-
MicroROS-Pi5 ROS2 Robot Car for Raspberry Pi 5 (ROS2-HUMBLE + Python3) I'm following the manual, but it says I need esp32s3 download tool microROS_Robot_V0.0.3.bindmf ckwdmfuaus qjwjsdl 3.9.5, but the site only has 3.9.7. Where on earth do I find it? Since the manual isn't updated, I can't buy it and try it, and time just keeps passing.
Hello friend,
We can't send more details here, send your question to this E-mail:support@yahboom.com
Our technical support will reply you as soon as possible to help you solve the problem.
-
What is the max speed of the robot?
Hello friend,
We didn'r test that max speed. Motor speed is 450+10rpm.